我院在第十三屆全國海洋航行器設(shè)計與制作大賽榮獲一等獎!
2024年8月10-11日,第十三屆全國海洋航行器設(shè)計與制作大賽暨首屆船舶與海洋工程類教師教學創(chuàng)新大賽在江蘇科技大學勝利召開。本次賽事由中國科學技術(shù)協(xié)會和中華人民共和國工業(yè)和信息化部指導,中國船舶集團有限公司、中國造船工程學會、國際船舶與海洋工程創(chuàng)新與合作組織等多家單位聯(lián)合主辦,中國高等教育學會支持,江蘇科技大學承辦,是船舶與海洋工程領(lǐng)域?qū)哟巫罡摺⒁?guī)模最大、覆蓋面最廣的學生科技創(chuàng)新競賽。代表了國內(nèi)船舶與海洋工程領(lǐng)域內(nèi)大學生創(chuàng)新競賽的最高水平。本屆大賽共吸引上海交通大學、浙江大學、華中科技大學等386所院校和科研機構(gòu)的2555支參賽隊伍、13559名師生通過線上線下相結(jié)合的方式展開角逐,經(jīng)過區(qū)域賽評審及推薦,共有139家單位、1228支隊伍、7413名師生入圍國賽。
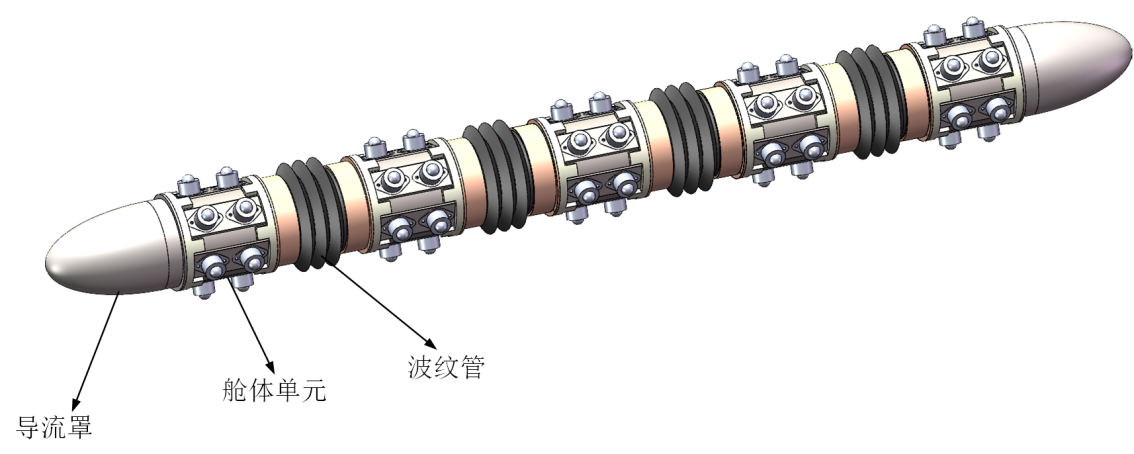
我校的參賽作品“再見深藍—hydra水下蛇形機器人”榮獲全國一等獎,是我校首次在該比賽中獲獎。

安全與海洋工程學院學生任牧雨同學在張玉教授的指導下,針對復雜海洋服役環(huán)境,設(shè)計了一種水下作業(yè)多關(guān)節(jié)蛇形機器人,該機器人由多個關(guān)節(jié)功能單元組成,每個功能單元艙體可搭載不同傳感器,根據(jù)水下執(zhí)行任務需求可拆分重組功能單元,滿足不同復雜海洋環(huán)境中的多種作業(yè)需求。該機器人的每個功能具有兩個運動自由度,可完成偏航、俯仰兩種運動模式,多個單元關(guān)節(jié)相互疊加,可以合成多種運動模式,通過設(shè)計優(yōu)化完成水中任意運動需求。為水下作業(yè)機器人提供了新思路、新構(gòu)想、新方案。