


機械與儲運工程學(xué)院ISFR機器人團隊在《Soft Robotics》雜志發(fā)表論文:帶有大魚際的靈活多關(guān)節(jié)軟體仿生手
軟體機械手由于自身材料的柔軟特性,在順應(yīng)性,、抗沖擊性方面有著得天獨厚的優(yōu)勢,不但可以實現(xiàn)抓取不同重量,、大小、形狀的物體,,并且自身受到外界擠壓,、扭轉(zhuǎn)時,幾乎不會損壞,。近年來,,相較于剛性機械手,結(jié)構(gòu)簡單,、制作便捷的軟體機械手吸引了越來越多研究人員的注意,。根據(jù)手指原理結(jié)構(gòu)的不同,仿生手指經(jīng)歷了從單腔執(zhí)行器向多腔執(zhí)行器發(fā)展的過程,。單腔執(zhí)行器工作狀態(tài)下呈現(xiàn)出較為標準的圓弧狀,,依靠自身材料的順應(yīng)性被動地適應(yīng)被抓取物體的形狀和尺寸,但仍不能像人手一樣依靠多個關(guān)節(jié)之間的配合做出復(fù)雜的手勢或主動地適應(yīng)物體的外形,、尺寸和表面,,仿人手多關(guān)節(jié)結(jié)構(gòu)的多腔執(zhí)行器成為了設(shè)計靈活手的更佳選擇。
近日,,機械與儲運工程學(xué)院機器人工程專業(yè)劉書海,、肖華平兩位老師組建的ISFR機器人團隊,提出了一種多關(guān)節(jié)的氣動軟體靈活機械手,。仿生手指和仿生拇指(包括大魚際執(zhí)行器)通過多步澆注的工藝制備,,由氣壓驅(qū)動,具有良好的彎曲性能和輸出力,。人的手掌正面拇指根部,,下至掌跟,伸開手掌時明顯突起的部位,,醫(yī)學(xué)上稱其為大魚際,,由于大魚際的存在,使得大拇指擁有顯著的靈活性,。機械手的每個手指關(guān)節(jié)可以獨立彎曲,,配合靈活的大魚際氣動肌肉,能夠模仿多種人手動作甚至是用手語表達字母,,還能夠?qū)崿F(xiàn)對于不同大小,、重量、形狀和表面紋理的目標物的穩(wěn)定抓取,。該項研究成果以博士研究生郝天澤為第一作者在國際機器人領(lǐng)域著名期刊《Soft Robotics》和《Smart Materials and Structures》上以“Multijointed pneumatic soft hand with flexible thenar”和“Flexible and stable grasping by multi-jointed pneumatic actuator mimicking the human finger-impacts of structural parameters on performance” 為題發(fā)表,。
鏈接:https://www.liebertpub.com/doi/10.1089/soro.2021.0017
https://iopscience.iop.org/article/10.1088/1361-665X/ac3405
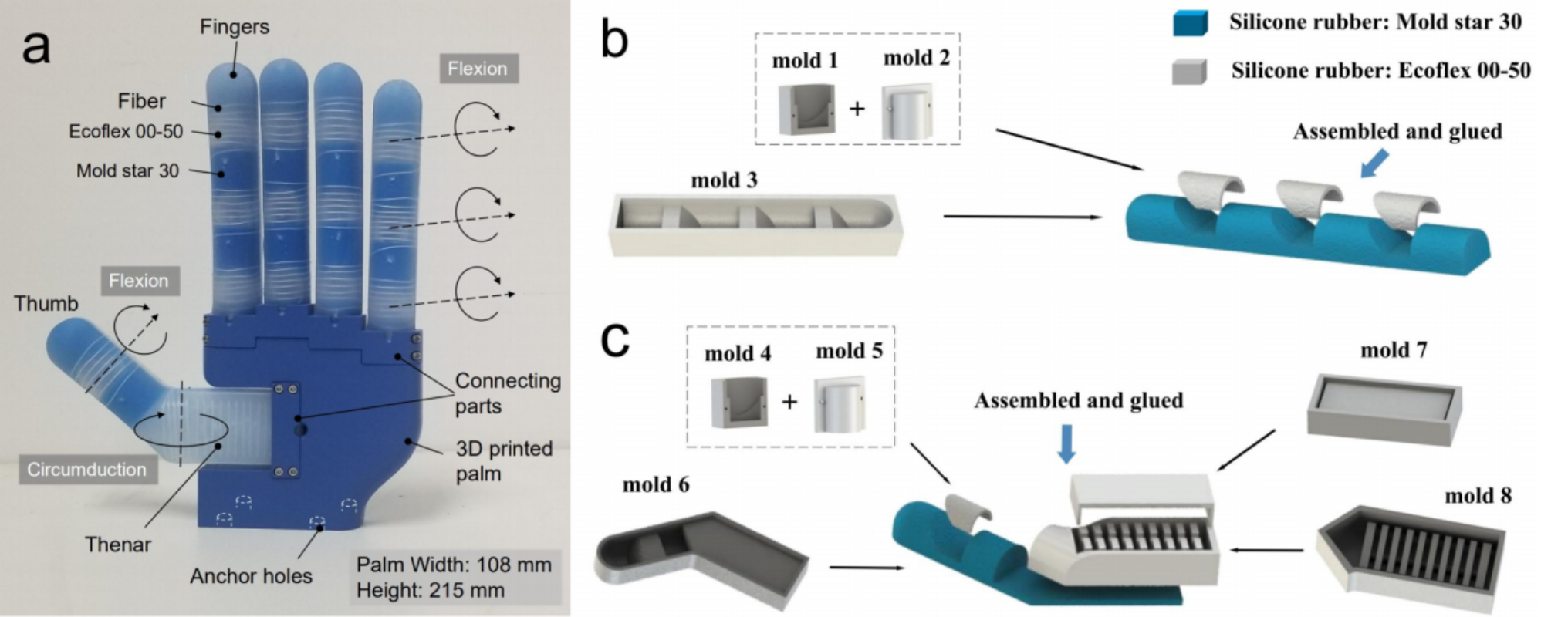
多關(guān)節(jié)仿生手的實物圖及設(shè)計、制造流程。(a) 多關(guān)節(jié)仿生手的部件示意圖,;(b) 仿生手指和(c) 仿生拇指的制作流程,。
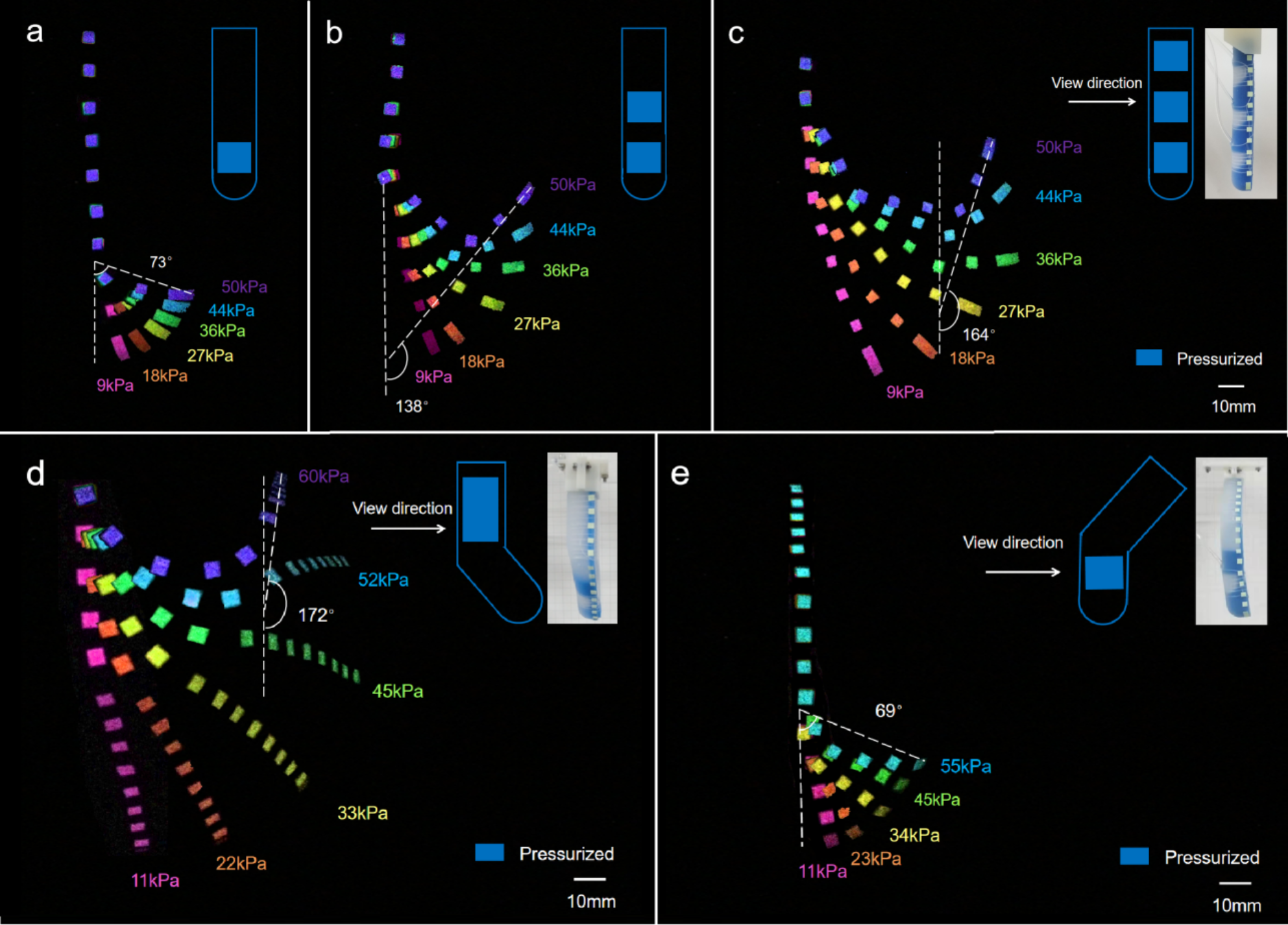
手指和拇指(包括大魚際)在不同氣壓下的彎曲軌跡。(a-c)仿生手指不同關(guān)節(jié)的彎曲軌跡,;(d)拇指的彎曲軌跡,;(e)大魚際的彎曲軌跡。
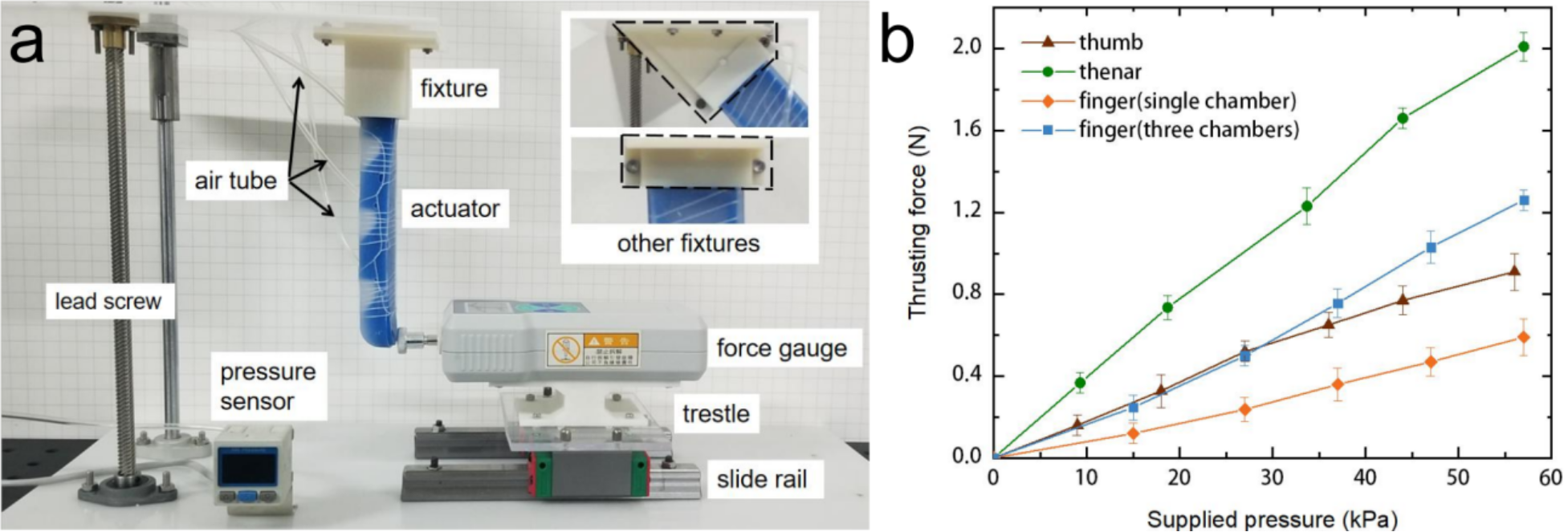
推力測試實驗,。(a)推力試驗臺,;(b) 不同氣壓下仿生執(zhí)行器的推力.

用手語手勢表達26個英文字母。
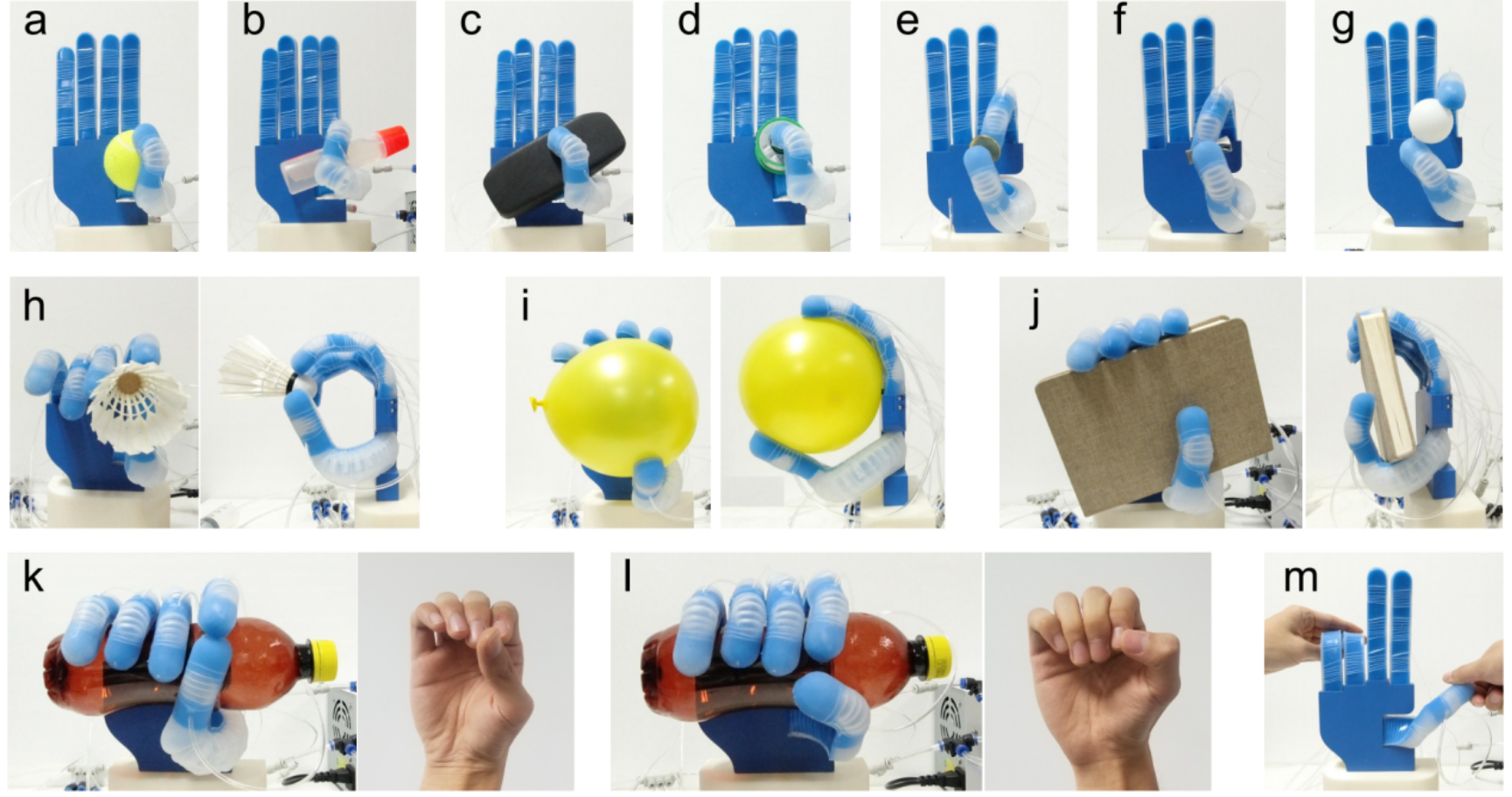
用三種抓取方式抓取不同目標物,。(a-d) 拇指抓取方式;(e-g)精準抓取方式,;(h-l) 有力抓取方式,;(m) 穩(wěn)定性測試。
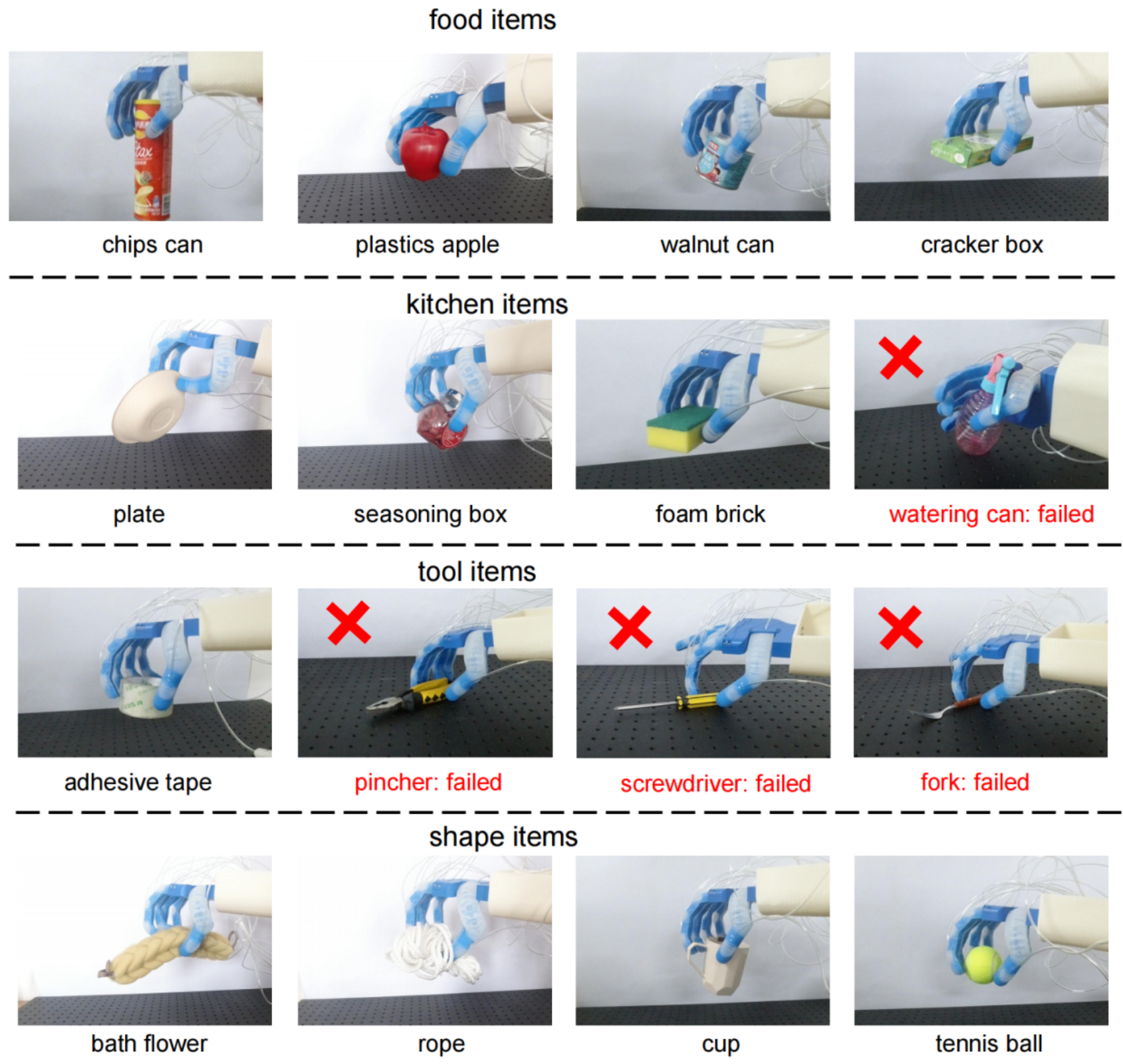
YCB(Yale-CMU-Berkeley)抓取測試,。
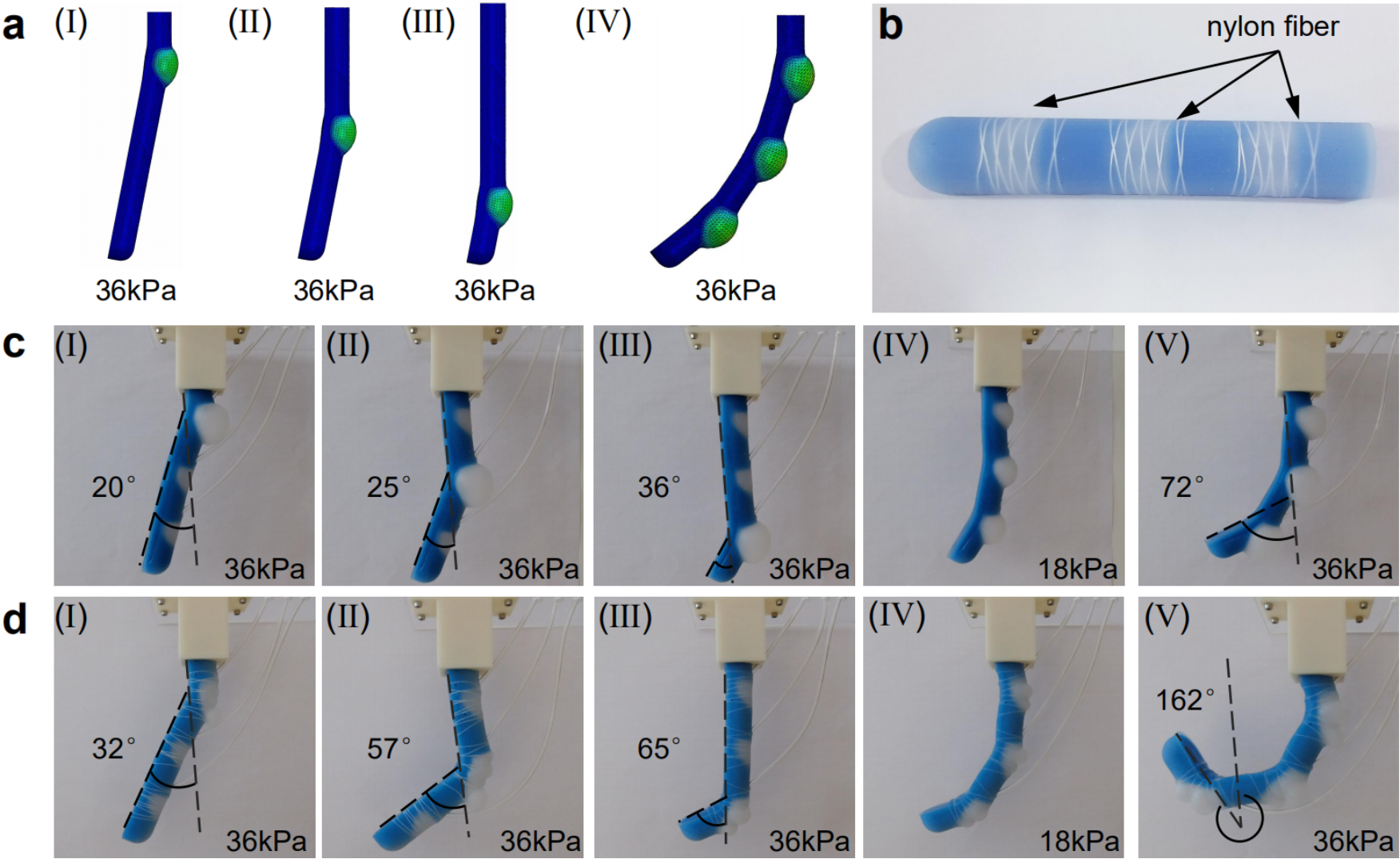
執(zhí)行器的仿真和實驗對比,。(a)36kPa下三腔執(zhí)行器的仿真預(yù)測結(jié)果;(b)纖維增強的三腔執(zhí)行器,;(c)無纖維增強的三腔執(zhí)行器的彎曲結(jié)果,;(d)纖維增強的三腔執(zhí)行器的彎曲結(jié)果.