
基于工程經(jīng)驗(yàn)的群智能通用PID參數(shù)整定
中文題目:基于工程經(jīng)驗(yàn)的群智能通用PID參數(shù)整定
論文題目:Engineering experience-based swarm intelligence for generalized PID tuning
錄用會議:2025 IEEE 14th Data Driven Control and Learning Systems Conference(CAA-A類會議)
錄用時(shí)間: 2025.03.20
作者列表:
1)王鎧銘 中國石油大學(xué)(北京)人工智能學(xué)院 控制科學(xué)與工程 碩23
2)王 珠 中國石油大學(xué)(北京)人工智能學(xué)院 自動化系教師
3)周建橋 中國石油大學(xué)(北京)人工智能學(xué)院 控制科學(xué)與工程 博21
摘要:
PID控制器被廣泛應(yīng)用于工業(yè)過程控制中。然而,傳統(tǒng)PID參數(shù)整定方法在應(yīng)用于復(fù)雜的動態(tài)系統(tǒng)時(shí),尤其是在變工況條件下,往往會面臨很大的局限性。這些挑戰(zhàn)可能導(dǎo)致經(jīng)驗(yàn)不可行解(EIS)問題。為緩解這一問題,本文提出了一種將工程經(jīng)驗(yàn)與粒子群優(yōu)化(PSO)相結(jié)合的PID調(diào)節(jié)方法。通過定義參數(shù)空間并引入?yún)?shù)物理優(yōu)化方向約束,該方法有效避免了 EIS 的發(fā)生。通過數(shù)值模擬,基于工程經(jīng)驗(yàn)的Levy-Memory-PSO (EE-LMPSO)算法被用于優(yōu)化PID參數(shù)。通過與傳統(tǒng)方法的比較,證明了該算法在優(yōu)化性能、可靠性和控制精度方面的優(yōu)勢。實(shí)驗(yàn)結(jié)果表明,所提出的方法提高了調(diào)整效率,增強(qiáng)了系統(tǒng)穩(wěn)定性,并在復(fù)雜的動態(tài)環(huán)境中實(shí)現(xiàn)了更好的控制性能。
背景與動機(jī):
PID參數(shù)以實(shí)現(xiàn)精確穩(wěn)定的閉環(huán)控制被認(rèn)為是一個(gè)"NP-Hard"問題,類似于所有非凸優(yōu)化問題。PSO具有全局搜索能力,且實(shí)施簡單,因此在PID參數(shù)優(yōu)化方面越來越受歡迎。但在實(shí)際應(yīng)用中,其優(yōu)化結(jié)果可能在數(shù)學(xué)上滿足目標(biāo)函數(shù),但卻不符合工程預(yù)期,即EIS問題。造成EIS問題的主要原因是參數(shù)空間配置不合理、缺乏參數(shù)物理優(yōu)化約束以及目標(biāo)函數(shù)設(shè)計(jì)不當(dāng)。
設(shè)計(jì)與實(shí)現(xiàn):
1)開環(huán)增益內(nèi)核準(zhǔn)則(Rule.1)
通過帶有Nussbaum Gain的在線遞推辨識算法,構(gòu)建系統(tǒng)的高階線性時(shí)變模型,得到時(shí)變參數(shù)后計(jì)算當(dāng)前工況下的開環(huán)增益 , 基于該增益,限定比例增益
, 基于該增益,限定比例增益 的初始參數(shù)空間:
的初始參數(shù)空間:

2)積分-微分時(shí)間比例準(zhǔn)則(Rule.2)
針對不同系統(tǒng)延遲特性,引入積分與微分時(shí)間的比例因子 , 可根據(jù)延遲程度自適應(yīng)調(diào)整動態(tài)響應(yīng),約束關(guān)系:
, 可根據(jù)延遲程度自適應(yīng)調(diào)整動態(tài)響應(yīng),約束關(guān)系:

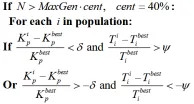
3)比例-積分優(yōu)化協(xié)調(diào)準(zhǔn)則(Rule.3)
當(dāng)粒子群迭代收斂中后期,與
 同時(shí)偏離其最優(yōu)解趨勢時(shí),系統(tǒng)可能陷入局部最優(yōu)或無效搜索。為此引入動態(tài)協(xié)調(diào)機(jī)制:當(dāng)兩參數(shù)相對偏差超過設(shè)定閾值時(shí),觸發(fā)粒子位置隨機(jī)重置。
同時(shí)偏離其最優(yōu)解趨勢時(shí),系統(tǒng)可能陷入局部最優(yōu)或無效搜索。為此引入動態(tài)協(xié)調(diào)機(jī)制:當(dāng)兩參數(shù)相對偏差超過設(shè)定閾值時(shí),觸發(fā)粒子位置隨機(jī)重置。
主要內(nèi)容:
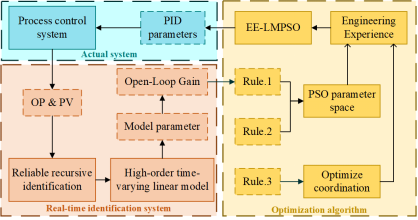
EE-LMPSO-PID在線閉環(huán)智能調(diào)整控制器參數(shù)的方案如下:
1) 數(shù)據(jù)采集:在當(dāng)前的控制系統(tǒng)中,首先確定采樣頻率,然后采集控制回路的操縱變量(OP)和過程變量(PV);
2) 建立模型:使用高階線性時(shí)變模型捕捉對象的動態(tài)特性,并將模型開環(huán)增益賦予Rule.1;
3) 確定目標(biāo)函數(shù):根據(jù)綜合性能指標(biāo)選擇合適的 和
和 值;
值;
4) 初始化:根據(jù)規(guī)則Rule.1和Rule.2形成PSO初始化空間,并設(shè)置PSO超參數(shù);
5) 計(jì)算適合度函數(shù);
6) 更新粒子的速度和位置;
7) 更新全局最優(yōu)位置;
8) 參數(shù)優(yōu)化約束:引入Rule.3;
9) 重復(fù)步驟5)至8),直至滿足終止條件;
10) 輸出PID最佳參數(shù)。
實(shí)驗(yàn)結(jié)果及分析:
為了驗(yàn)證將EE納入LMPSO的有效性,并評估其針對EIS的預(yù)防能力。本研究以數(shù)值仿真作為對象,通過對比實(shí)驗(yàn),揭示EE對LMPSO優(yōu)化效率的提升及其降低EIS 發(fā)生概率的能力。實(shí)驗(yàn)工作流程包括四項(xiàng)內(nèi)容:
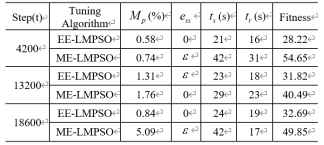
1)構(gòu)建基于Rule.1和Rule.2形成的理論參數(shù)空間和經(jīng)過多次實(shí)驗(yàn)積累形成的經(jīng)驗(yàn)參數(shù)空間(ME-LMPSO),并比較兩者在相同實(shí)驗(yàn)條件下的優(yōu)化性能。
表 1 EE-LMPSO 和 ME-LMPSO 優(yōu)化性能對比表
2)通過是否啟用Rule.3驗(yàn)證粒子收斂速度和優(yōu)化精度的性能差異,進(jìn)而驗(yàn)證其有效性。
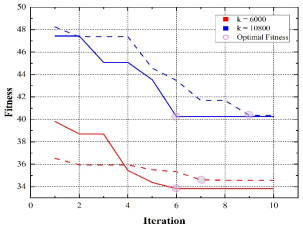
圖 1 比例-積分優(yōu)化協(xié)調(diào)下的優(yōu)化效率比較
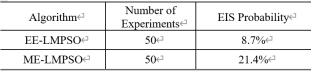
3)在粒子數(shù)和迭代次數(shù)較少的條件下,通過多次獨(dú)立重復(fù)實(shí)驗(yàn),記錄并分析實(shí)驗(yàn)中出現(xiàn)EIS的概率,從而比較有/無工程經(jīng)驗(yàn)的LMPSO在防止EIS問題上的能力差異。
表 2 EE-LMPSO和ME-LMPSO的EIS概率比較
4)通過比較和分析跟蹤精度、穩(wěn)定性和響應(yīng)時(shí)間的差異,評估輸出跟蹤參考輸入的可靠性。
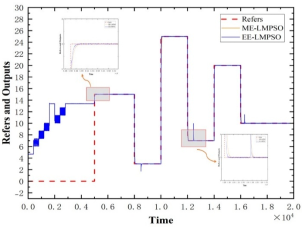
圖 2 ME-LMPSO和EE-LMPSO輸出跟蹤參考輸入
實(shí)驗(yàn)結(jié)果綜合表明,所提出的 EE-LMPSO 方法在多個(gè)方面具有明顯優(yōu)勢:其構(gòu)建的參數(shù)空間更合理,提升了整定性能(實(shí)驗(yàn)一);引入方向性約束優(yōu)化了收斂效率(實(shí)驗(yàn)二);在資源受限條件下顯著降低了經(jīng)驗(yàn)不可行解發(fā)生概率(實(shí)驗(yàn)三);并在動態(tài)控制中實(shí)現(xiàn)了更優(yōu)的跟蹤精度與系統(tǒng)穩(wěn)定性(實(shí)驗(yàn)四)。以上結(jié)果充分驗(yàn)證了將工程經(jīng)驗(yàn)融入優(yōu)化過程的有效性與實(shí)用性。
結(jié)論:
本文介紹的改進(jìn)優(yōu)化算法將物理工程經(jīng)驗(yàn)與群智能優(yōu)化相結(jié)合,有效地緩解了傳統(tǒng)參數(shù)調(diào)整方法中經(jīng)常出現(xiàn)的經(jīng)驗(yàn)不可行解的問題。仿真結(jié)果表明,在復(fù)雜的動態(tài)系統(tǒng)中,該方法比傳統(tǒng)方法更具優(yōu)勢,尤其是在縮短調(diào)整時(shí)間和提高控制精度方面。進(jìn)一步的實(shí)驗(yàn)證實(shí)了將物理工程經(jīng)驗(yàn)融入優(yōu)化過程的有益影響,突出了該方法在工業(yè)控制系統(tǒng)中廣泛應(yīng)用的潛力。
通訊作者簡介:
王珠,博士,中共黨員,現(xiàn)任中國石油大學(xué)(北京)副教授、碩士生導(dǎo)師。2016年至今在中國石油大學(xué)(北京)自動化系工作,現(xiàn)任中國自動化學(xué)會人工智能技術(shù)與工業(yè)應(yīng)用專業(yè)委員會委員、中國化工學(xué)會信息技術(shù)應(yīng)用專業(yè)委員會青年委員、北京人工智能學(xué)會理事。
在科研與社會服務(wù)方面,研究興趣為系統(tǒng)辨識與智能控制、煉化過程動態(tài)異常診斷與故障預(yù)警、大數(shù)據(jù)質(zhì)量預(yù)測與綜合優(yōu)化。近年來,主持重點(diǎn)流程工業(yè)企業(yè)的高級智能報(bào)警項(xiàng)目數(shù)項(xiàng)以及國家自然科學(xué)基金項(xiàng)目,已發(fā)表高水平學(xué)術(shù)論文30余篇。